the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 03 Jul 2025
| 03 Jul 2025
A high-duty-cycle transmitter unit for steady-state surface NMR instruments
Nikhil B. Gaikwad
Lichao Liu
Matthew P. Griffiths
Denys Grombacher
Groundwater measurements using surface nuclear magnetic resonance (NMR) have been notoriously challenged by a poor signal-to-noise ratio (SNR), but a new steady-state methodology based on long, high-duty-cycle, phase-locked pulse trains has demonstrated huge SNR increases. The hardware requirements for transmitters for steady-state surface NMR are significantly increased compared to transmitters for standard surface NMR use, due to the need for very high pulse-to-pulse stability over long survey times and the increased thermal load caused by a much higher duty cycle. Furthermore, the increased SNR leads to increased production rates, necessitating lightweight equipment that can easily be carried between many field sites during surveys. Here we demonstrate a novel steady-state surface NMR transmitter with a maximum 93 A peak current. The stability of the transmitter is evaluated on 10 min pulse trains with a duty cycle of 10 %, containing pulses of either 5, 10, 20, or 40 ms duration and low or high current. We observe less than 150 ns pulse-to-pulse timing jitter and amplitude variations below 0.4 % between pulses for all pulse durations and currents. During tests, we observe no temperature effects on the timing and current stability. We have designed a customized heatsink, which reduces the transmitter weight by 30 % and the size by 16 % without compromising safe thermal operating conditions. We evaluate the capacitor bank size and current stability and demonstrate that a 10 mF capacitor bank is an appropriate trade-off with insignificant current-drooping in measurements. The extensive analysis and verification demonstrate that the transmitter generates highly stable pulse trains resulting in high-SNR signals.
- Article
(5257 KB) - Full-text XML
- BibTeX
- EndNote




Groundwater is the most important source of water for billions of people in the world, but the resources are threatened by over-exploitation, pollution, and climate change (Postel, 2000; Famiglietti, 2014; Liu et al., 2017). There is a need for non-invasive geophysical tools that can be used in the exploration of new aquifers and in the monitoring of existing aquifers.
Many electric and electromagnetic methods are used for this purpose (Binley et al., 2015; Wu et al., 2019; Beauchamp et al., 2018). One well-established method is to use transient electromagnetic (TEM) instruments to measure the electrical resistivity of the subsurface as a function of depth. TEM instruments can be mounted on moving platforms, both ground-based and airborne, and can therefore provide 2D and 3D maps of the subsurface resistivity (Siemon et al., 2009; Wu et al., 2019). Due to the correlation between the electrical resistivity and the subsurface lithology (e.g. clays have low resistivity, and sands have high resistivity), geological structures in the subsurface can be mapped and potential aquifer sites can be located. The electrical resistivity is affected by the presence of groundwater but is not directly sensitive to water. Interpretation of data can therefore be ambiguous. The only geophysical method with a direct sensitivity to groundwater is surface nuclear magnetic resonance (NMR) (Behroozmand et al., 2015).
Surface NMR is based on the same principles as magnetic resonance imaging. In a static magnetic field, such as the Earth's magnetic field, the nuclear spins of hydrogen nuclei are preferentially aligned along the magnetic field. After the nuclear spins are perturbed by an electromagnetic pulse at the resonant frequency, they relax back to equilibrium and emit an NMR signal, which can be detected with an induction coil. The amplitude of the NMR signal is proportional to the number of excited nuclear spins, i.e. the water content. The relaxation time of the NMR signal is controlled by the host material, e.g. porosity and mineral composition, and therefore carries information about subsurface constituents and the ability of water to flow (Legchenko et al., 2002; Behroozmand et al., 2015). A surface NMR measurement is conducted using a large coil, typically between 50 m × 50 m and 100 m × 100 m, laid out on the surface, to transmit the NMR pulse and receive the NMR signal. Data are collected using a sounding approach where the pulse current controls the effective depth of excitation. By repeating the measurements with different pulse currents, the water content and relaxation times are mapped as a function of depth.
NMR signals from groundwater have a small amplitude, in the 10–100 nV range. Consequently, signals are easily drowned in electromagnetic noise from infrastructure or atmospheric sources (Kremer et al., 2022). Since the invention of surface NMR in the early 1980s, a significant amount of research has been concerned with improving the signal-to-noise ratio (SNR) either from the hardware perspective or from the signal-processing perspective. Focusing on the hardware side, multichannel instruments capable of remote reference noise cancellation have been very successful (Radic, 2006; Walsh, 2008). Other works have focused on reducing the instrument dead time to capture the early high-amplitude part of decaying signals (Walsh et al., 2014; Li et al., 2015; Du et al., 2020; Lin et al., 2020), on hardware for specialized application in tunnel construction (Costabel, 2019; Yi et al., 2019), on receiver coil geometries with reduced noise sensitivity (Girard et al., 2020; Wang et al., 2022), or on increased depth of investigation (Legchenko and Pierrat, 2014). Adiabatic NMR excitation, where the frequency and amplitude are modulated during the excitation pulse, can provide a more uniform excitation of the subsurface and thereby enhance the NMR signal amplitude but at the expense of depth resolution (Grunewald et al., 2016). Recently, signal enhancement through pre-polarization of the nuclear spins by a strong DC field has been introduced, but the depth of investigation is limited to less than 1 m (Lin et al., 2021; Hiller et al., 2021). It is noteworthy that the development of surface NMR transmitters has mainly taken place at commercial companies and that available publications are often sparse on technical details (e.g. Radic, 2006; Walsh, 2008).
The standard surface NMR experiment is the free induction decay (FID), where the relaxation following a single transmitter pulse is measured (Jiang et al., 2021). To ensure a high signal-to-noise ratio, the experiment is repeated many times over and the data are averaged. However, to ensure that the NMR experiment starts from equilibrium conditions, which is an implicit condition in standard modelling codes, it is necessary to include a wait time of typically several seconds between pulses, which leads to very long acquisition times when an average of tens or hundreds of pulses for each of typically 10 to 20 different pulse currents is used.
We have recently introduced a novel steady-state approach to surface NMR, which is radically different from FID measurements (Grombacher et al., 2021, 2022; Griffiths et al., 2022). Instead of single-pulse excitation, we use a train of closely spaced identical pulses of ∼ 100 ms to drive the nuclear spins into a new equilibrium, the steady state, which is measured between pulses. This eliminates the wait time and allows us to measure much faster, i.e. approximately 10 times per second in contrast to the standard once every 5 seconds. This 50-fold-increased data rate and the new narrowband signal detection methods lead to an enhancement of orders of magnitude in SNR and in turn allow much faster measurements, hence enabling a much higher production rate, where many different groundwater targets can be measured in a single day. Steady-state methods are a well-developed concept in other fields of NMR and date back to the 1950s (Carr, 1958), but steady-state methods have not been applied to surface NMR until now, as the necessary transmitter technology did not exist.
The new steady-state pulsing scheme places much higher demands on the NMR transmitter electronics than standard FID measurements. The steady-state concept enforces very strict requirements on the amplitude stability, and the timing jitter between pulses and the continuous pulsing lead to a higher thermal load on the instrument. Furthermore, the improved signal-to-noise ratio leads to a much higher production rate, i.e. more field sites per day, and the weight of the instrument becomes an important parameter.
The aim of this paper is to discuss the specific requirements for a high-duty-cycle steady-state NMR transmitter, present our designs, and document the electronic and thermal performance of the transmitter. In particular, we demonstrate the amplitude and timing stability of the pulse trains over extended measurement times, which is key to achieving the NMR steady state. The paper is structured as follows. In the next section, we discuss the requirements of the transmitter from the NMR physics perspective. This is followed by a discussion of the design of the transmitter, simulations of the instrument, and experimental verification before concluding remarks are given.
The concept of steady-state surface NMR is illustrated in Fig. 1. The transmitter delivers a continuous train of closely spaced NMR pulses. The spacing is so close that the nuclear spins do not return to the original equilibrium state between pulses. Instead, after a few seconds of pulsing, the nuclear spins enter a new equilibrium, the steady state, where excitation balances relaxation.
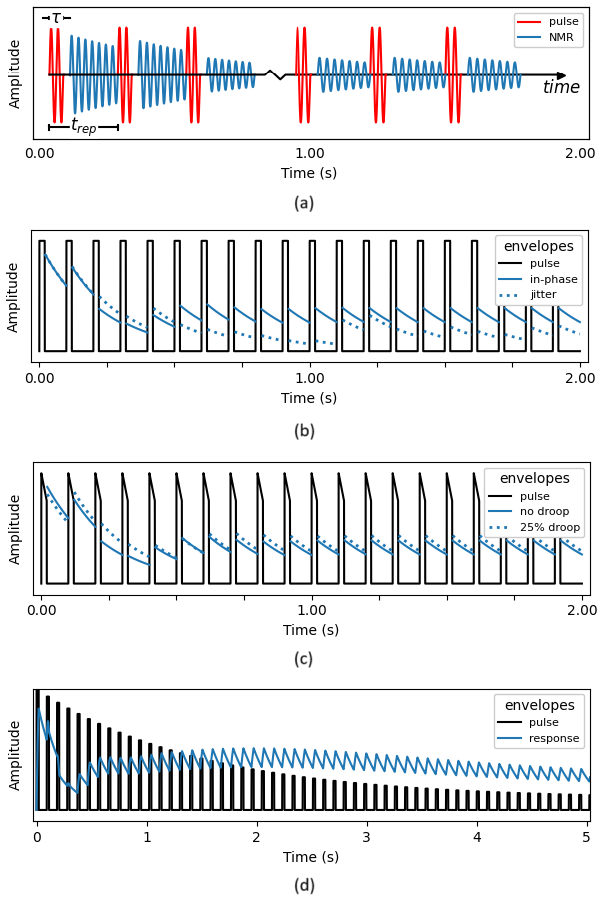
Figure 1Steady-state surface NMR physics. (a) Illustration of a steady-state sequence with pulse duration, τ, and repetition time, trep. (b) Effects of pulse jitter. (c) Effects of intra-pulse drooping. (d) Effects of inter-pulse drooping.
By varying the pulse train parameters, e.g. pulse duration or delay between pulses, different steady states are obtained, and the properties of the groundwater can be extracted from data using numerical modelling of the NMR Bloch equations (Griffiths et al., 2021). Contrary to common belief (Zhu et al., 2019), the envelope of an NMR transmitter pulse does not have to be boxcar-shaped for FID or steady state. If the full waveform of the NMR pulse is measured, the pulse shape can be included in the modelling (Griffiths et al., 2021). The defining aspect of the steady-state pulse train is that, firstly, phase coherence between pulses is maintained (i.e. timing jitter between pulses is negligible) and that, secondly, all pulses are identical. The detrimental effect of timing jitter is illustrated in Fig. 1b, where jitter prevents a steady state from building up. Figure 1c demonstrates that steady-state operation is achieved both with identical boxcar-shaped pulses and with identical pulses where the current amplitude drops by 25 % within each pulse. In contrast, the results in Fig. 1d show how current-drooping between pulses again prevents a steady state from building up.
3.1 System overview
Our surface NMR instrument, denoted Apsu (Liu et al., 2019; Larsen et al., 2020), shown in Fig. 2, includes four main subsystems. The instrument is powered from a 1 kW generator that feeds into the 0–600 V controllable power supply (ApsuPS). The NMR pulses are generated by an H-bridge in the transmitter unit (ApsuTX) with the pulse waveform controlled by the voltage and switching timing of the H-bridge (Larsen et al., 2020). The current pulses are injected into a large coil, typically 50 m × 50 m, to produce the NMR pulses. The ApsuTXC is the main unit in the instrument. It contains the circuitry that sequences the H-bridge control signals. An internal 200 MHz clock is used to control the on/off timing of each individual half-cycle oscillation in the pulse train. The unit also contains the receiver part, where the NMR signal and the current pulse waveform are sampled at 31.25 kHz with two 24-bit A/D converters (Liu et al., 2019). The analogue output from the high-bandwidth current probe (ApsuCP) is forwarded to the ApsuTXC, where it is sampled. The ApsuCP also contains the circuitry for operating the large coil in coincident mode; i.e. the same coil is used to transmit the NMR pulses and receive the NMR signals.
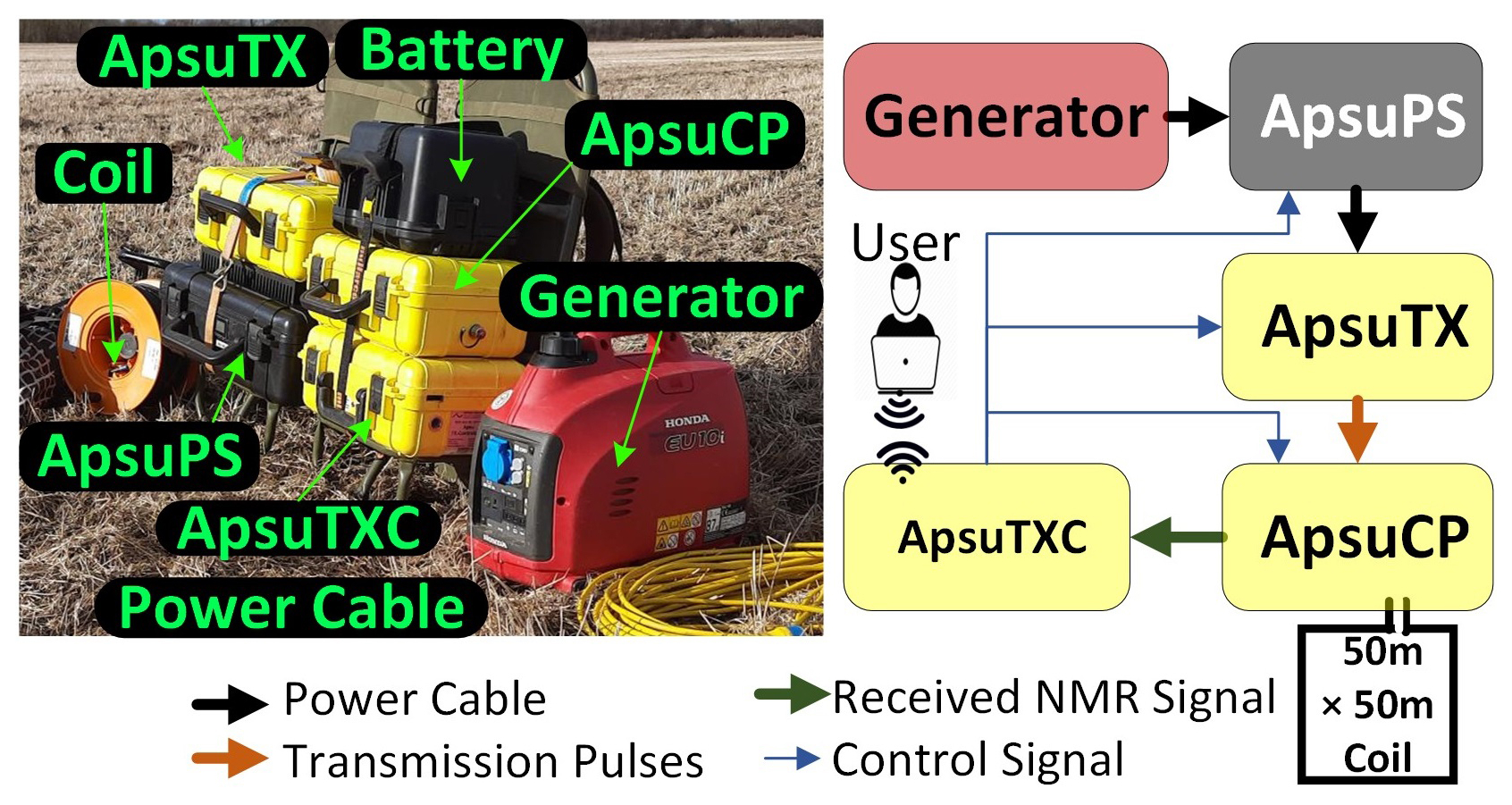
Figure 2Apsu surface NMR instrument mounted on two backpacks and schematic overview of the Apsu workflow.
The first version of the ApsuTX was designed to run conventional FID sequences with relatively low power requirements (Larsen et al., 2020). With steady-state sequences, the power requirements are significantly increased. We use different pulse sequences to generate different steady states. Typically, a pulse sequence lasts 60 s, which ensures that the initial few seconds of data where the steady state builds up can be culled and enough data are left for retrieval of the NMR signal. In standard surveys, we often use more than 30 different pulse sequences. Consequently, the instrument is in continuous operation for more than 30 min with a pulse duty cycle around 10 %. In addition, our surface NMR instruments are commonly used for remote surveys across the globe, often in challenging conditions. Therefore, the instrument needs to be compact, light in weight, handy, and efficient. These challenges motivated us to revisit our instrument for improved designs, especially the transmitter unit and its heavy heatsink.
3.2 Thermal management for ApsuTX
The heatsink is responsible for dissipating power lost during transmission. The H-bridge and damping resistor (Rd) are the main contributors and are physically mounted on the heatsink. In the first version of the ApsuTX, a commercially available standard heatsink (SH) was used. During this research, a thermal model of the transmitter was developed and used to design a customized heatsink (CH) to ensure a weight as low as possible while maintaining the necessary cooling properties. The thermal flow in the ApsuTX is simulated end-to-end, and the simulation is used to decide the appropriate size of the heatsink. Figure 3 shows the thermal model of the ApsuTX where the MOSFETs were chosen to achieve fast H-bridge switching time (Lin et al., 2021). The thermal power dissipation of MOSFETs mainly depends on drain-source ON resistance, peak current, and switching frequency, and these device parameters are considered in the simulation (Chen et al., 2020). The model provides access to the junction temperatures Tj of the MOSFETs, which must be maintained at less than 150 °C for stable operation. The junction temperature of the MOSFETs is given by
where P(t) is the electric power dissipated by a MOSFET and tp is the total time of the pulse (Nexperia, 2021). The thermal behaviour of all four MOSFET devices is modelled using the first-order Foster thermal model (Infineon Technologies AG, 2020). The transient thermal impedance (Zth) of the Foster thermal model is expressed as
where ri is thermal resistance, τi is the time constant, and n is the order of the model. The time constant is given by , where ci is the thermal capacity of the device (Nexperia, 2021); see Table 1. The thermal power flow through a MOSFET (Pth) is calculated using
Here, , with Tc being the case temperature of the device. All MOSFETs and Rd are mounted with thermal paste as an interfacing agent on the heatsink. The model considers the effect of the thermal paste, where its thickness, area, and thermal conductivity constant decide the thermal conduction rate. Also, the power dissipated by Rd and transferred to the heatsink through thermal resistance is included in the model. The heatsink dissipates the thermal energy to the surroundings through thermal convection, which depends on the material properties and the surface area. The model allows us to test the instrument under extreme conditions, such as high ambient temperatures, high current, and high duty cycle, for different pulse sequences.
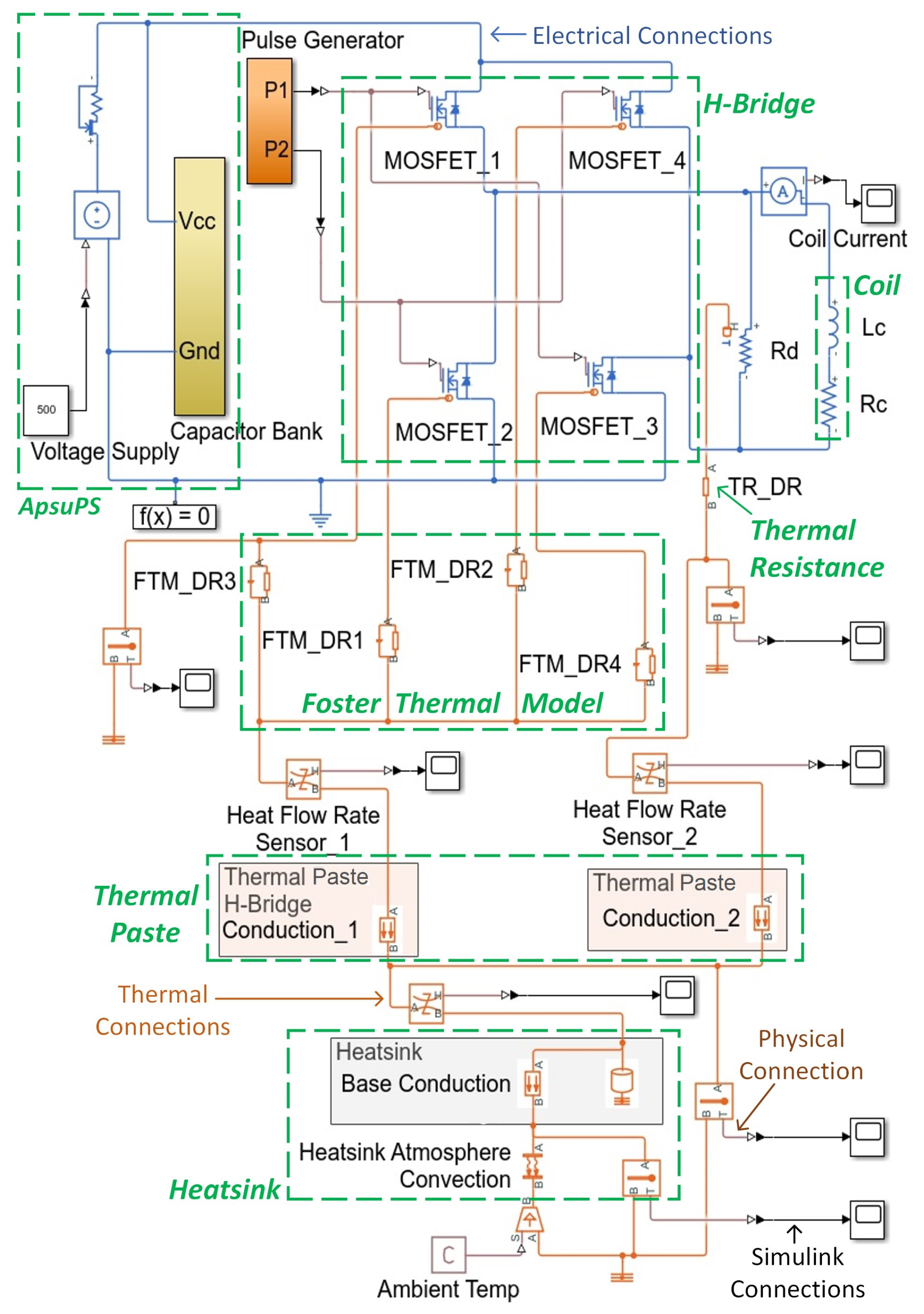
Figure 3Thermal model of the ApsuTX regarding H-bridge and damping resistor (Rd) as primary thermal sources.
3.3 Current-drooping
Consistency in pulse amplitudes is one of the critical concerns in steady-state surface NMR transmission. The power for the high-current pulses is supplied from the ApsuPS that contains a 0–600 V DC supply unit and the capacitor bank. The ApsuPS unit is powered by a 1 kW generator, which provides 1 A output. A lightweight generator and ApsuPS were chosen for field survey reasons, but this limits the current capacity of the power supply. This results in current-drooping in the initial part of the high-current pulse train. Because of this inconsistent amplitude, the initial portion of transmission pulses cannot be used to reach the steady state. The current-drooping is usually seen because of internal impedance present in the power source. This amplitude drooping cannot be removed entirely because of instrument limitations, but it can be optimized by selecting the correct capacitance value. The capacitance value, the drooping time, and the energy per pulse are interdependent. The drooping time and energy per pulse increase with a rising capacitance value. Ideally, the drooping time should be as short as possible, and the energy per pulse should be as high as possible. However, both requirements cannot be fulfilled simultaneously. The capacitance value must be selected as a trade-off between these interdependent parameters, which can also indirectly help to reduce the size and weight. As noted above, the NMR steady state is easily reached, regardless of any current-drooping within transmitter pulses, as long as the current-drooping is identical from pulse to pulse.
3.4 Pulse-to-pulse timing stability
Like amplitude stability, pulse-to-pulse timing stability also plays a crucial role in reaching the NMR steady state. The stability must be maintained throughout the entire pulse train, which typically lasts about 1 min and contains several hundred NMR pulses. The oscillation frequency of each NMR pulse, the Larmor frequency (Behroozmand et al., 2015), is matched with the local magnetic field of the Earth. Assuming a 2 kHz Larmor frequency, the timing jitter between transmitter pulse must be less than 1.4 µs to ensure less than 1° jitter in the pulse phase. The instrument clock is derived from a GPS disciplined oscillator, which controls the onset of each pulse in the train. The timing of each half-cycle within each pulse is controlled by an internal 200 MHz clock. It is necessary to control the pulse-to-pulse spacing so that there is an integer number of periods at the Larmor frequency between pulses to ensure a coherent excitation of the NMR instrument. For optimum resolution of the NMR instrument parameters, i.e. water content and relaxation time as a function of depth, the NMR instrument should be driven to many different steady states. This is achieved by varying the parameters of the pulse train, such as the pulse-to-pulse delay and the duration of each pulse. It is also beneficial to use more advanced pulse trains, e.g. with the phase alternating between pulses or with an off-resonance frequency (Grombacher et al., 2022).
4.1 Thermal simulation for two different heatsinks
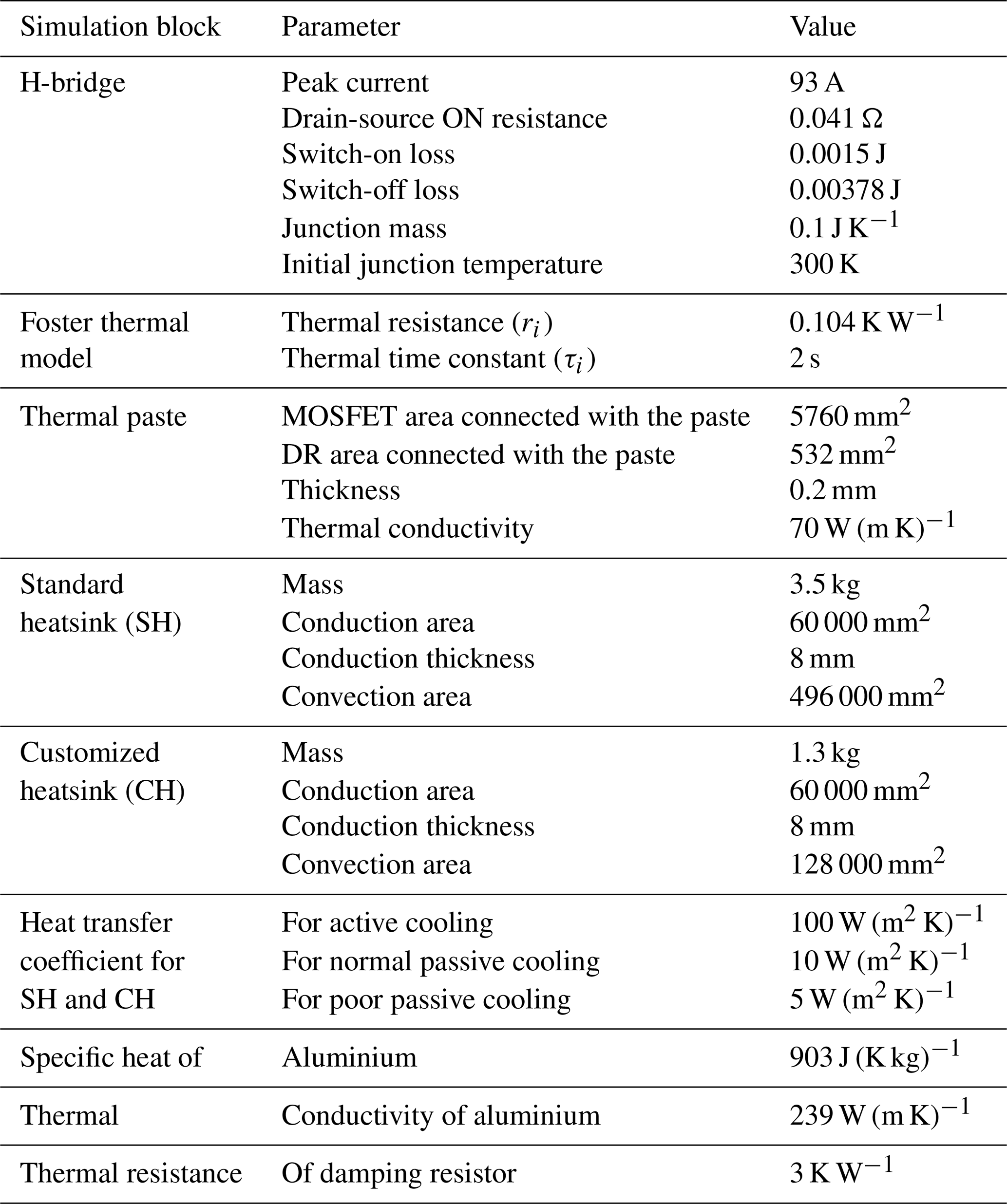
The MATLAB Simulink simulation starts from an older design, with a standard heatsink. All required thermal paste and heatsink dimensions were measured and are included in the simulation. The second simulation is done for the custom heatsink with reduced dimensions. Both simulations are run for three different cooling techniques and four different sequences. Typically, heat transfer coefficients vary from 2.5 to 500 W (m2 K)−1 depending on the type of cooling. We have broadly divided this range into three types, where 5 W (m2 K)−1 corresponds to poor passive cooling, 10 W (m2 K)−1 corresponds to normal passive cooling, and 100 W (m2 K)−1 corresponds to active cooling. As ApsuTX is run with different pulse durations in the pulse sequences, e.g. 10, 20, 40, and 100 ms, this is also included in the simulations.
4.2 Test setup of ApsuTX with customized heatsink
After verification through simulations, a new customized heatsink was fabricated and replaced the old heatsink. Figure 4 shows our field test setup. It includes three different temperature sensor nodes mounted on the MOSFET case (S1), the Rd case (S2), and the customized heatsink (S3). Sensors S1 and S2 cannot measure the internal MOSFET junction temperature and Rd temperature, but they are included to give a better understanding of the temperature variations in the transmitter. Sensor S3 directly measures the heatsink temperature. A National Instruments DAQ card collects these three analogue voltage values sensed by NTCALUG01A Series NTC Thermistors. The data are processed and time-stamped using a LabVIEW-based GUI. For the main field tests, we use steady-state sequences with 20 ms pulses and 72 A peak current, which are run continuously for 10 min. This is a much more intense sequence than used in the field, where high-current sequences are normally only 1 min.
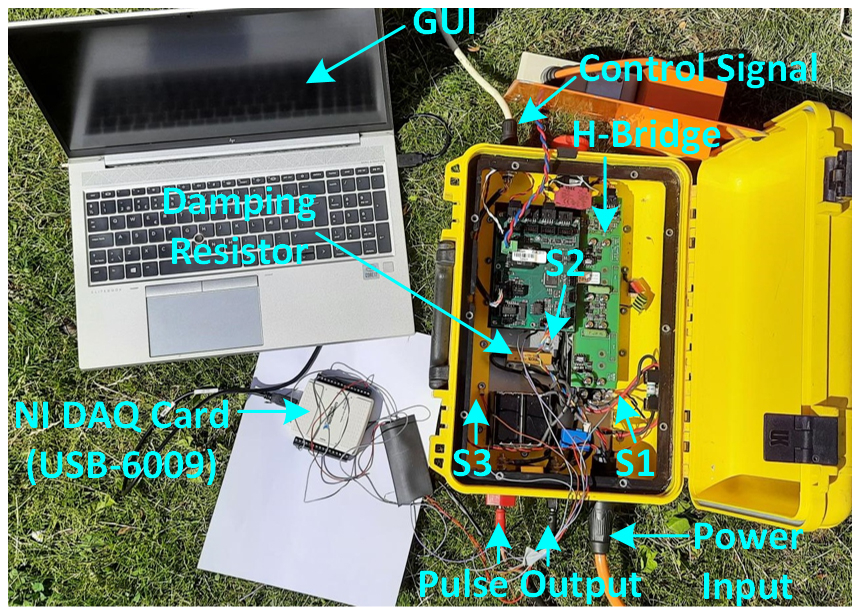
Figure 4Experimental test setup to evaluate the thermal performance of the new ApsuTX in the field surveys. The labels S1, S2, and S3 indicate MOSFET, Rd, and heatsink.
4.3 Current-drooping simulation
The drooping simulation includes the DC supply with the limited current capability and a capacitor bank, which emulates the variable DC power supply. We have run simulations with nine different capacitor banks from 1 to 100 mF to understand the effect of current-drooping in the transmitted NMR pulses. The capacitor banks need different charging times to reach their maximum voltage output. The capacitor bank with 100 mF required the longest time (75.5 s) and the capacitor bank with 1 mF required the shortest time (1.1 s) for complete charging. Also, the transmitted pulse generated by a higher capacitor bank is more stable than pulses from the lower capacitor bank.
The simulation instrument transmits high-current pulses with different intra-pulse and inter-pulse drooping. The time duration for amplitude stabilization and energy per pulse (after stabilization) is evaluated for all types of drooping. From the simulation results, we select the best-suited capacitor value. The instrument is tested on the field, and the chosen capacitor bank value is validated by the observed drooping.
4.4 Pulse stability measurement technique on field data
Collected data are studied to verify the pulse stability. We measure pulse drifts for 5, 10, 20, and 40 ms sequences. The pulse trains are sampled at 31.25 kHz by the ApsuTXC. The pulses are organized in the matrix with their respective time stamps. We fit a sinusoidal signal model to each pulse in the train, using nonlinear regression in MATLAB. The fitted signal measures the effective transmitted current through the coil at the Larmor frequency (Larsen et al., 2020), i.e. the component that must be phase-coherent between pulses for steady-state operation. We validate the instrument performance by evaluation of the phase and amplitude of all pulses for two different currents and four different sequences.
5.1 Thermal performance of ApsuTX
A customized heatsink was designed according to the simulations, field specifications, and compatibility with circuit placement. Figure 5 shows simulation results of the temperature changes for both types of heatsinks, cooling conditions, and extreme test duration, i.e. pulsing at the highest current for an extended period of time much longer than ever used in practice. Figure 5a presents the worst-case junction temperature (Tj) rise for both heatsinks and at different cooling conditions. It shows a 50 K temperature rise for 50 min of continuous pulsing at 93 A for the customized heatsink and poor passive cooling. Both heatsinks performed better for normal passive and active cooling. For the safe functioning of the H-bridge, the junction temperature must be maintained below 423.15 K, which is far from the observed temperature rise in the simulation. The simulations show that the junction temperature is maintained in a safe operating range even with poor cooling conditions in the ApsuTX with the customized heatsink. Active cooling shows better results, but it is not feasible due to the increased size and weight.
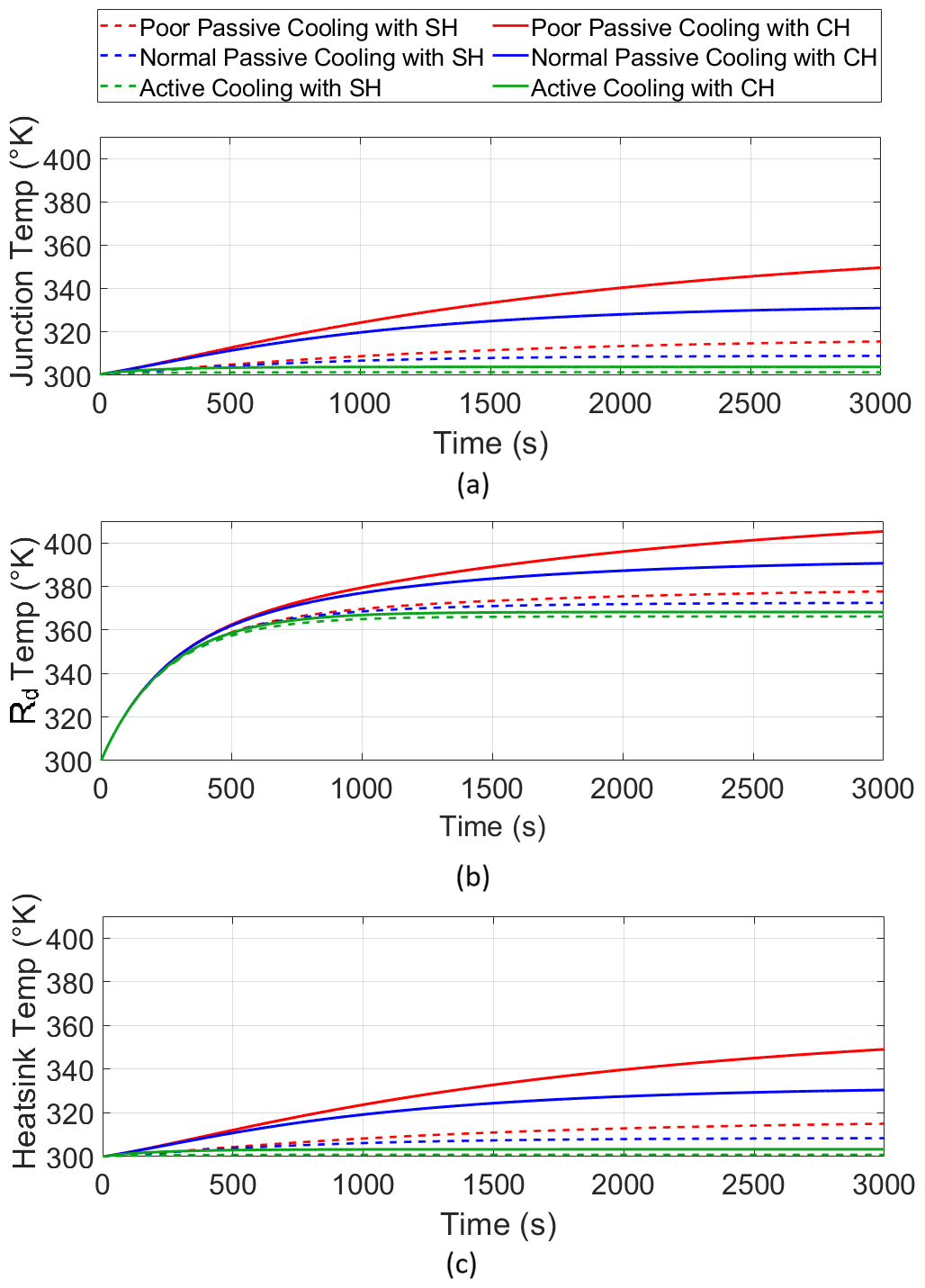
Figure 5Effect of different cooling techniques on (a) junction temperature (Tj), (b) Rd temperature, and (c) heatsink temperature for both SH and CH, running for 50 min.
Table 2Simulated thermal performance of ApsuTX with the two different heatsinks at extreme test conditions pulsing at 93 A for 3000 s.
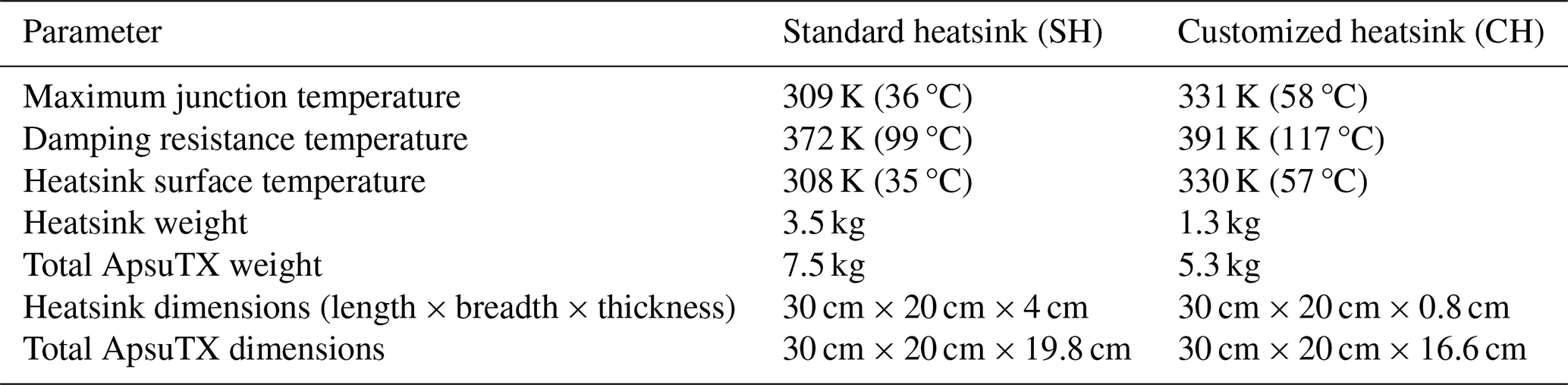
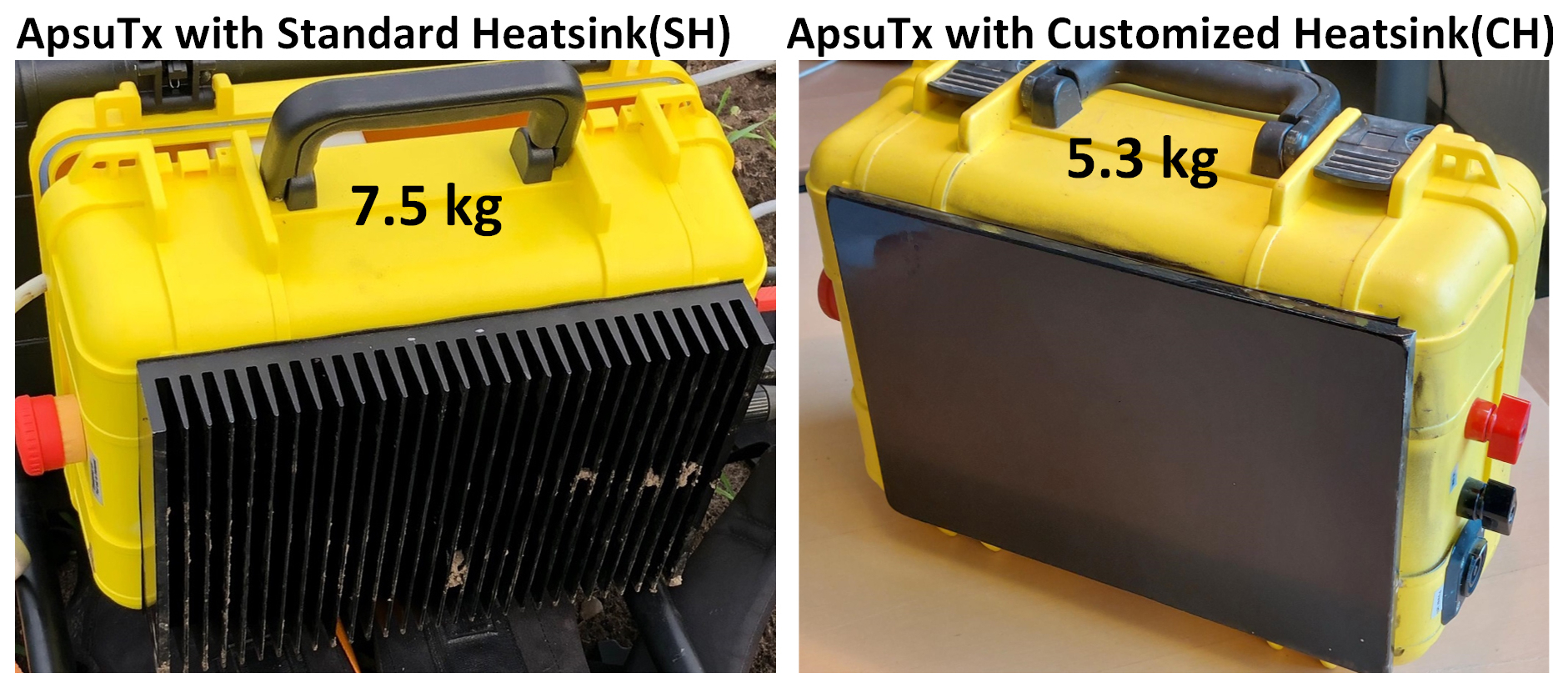
Unsurprisingly, the transmitter mounted with the larger, standard heatsink performs better than if it were mounted with the customized heatsink, but, importantly, it can run within safe thermal management using either. As shown in Fig. 5b, Rd is the most significant contributor to the thermal load. The cooling method and type of heatsink do not give rise to any significant differences in temperature variations. Finally, as shown in Fig. 5c, the heatsink temperature shows trends similar to the junction temperature. The plots show that the compact and lightweight CH can fulfil all thermal management requirements. The CH was fabricated and mounted on the updated ApsuTX, and we measured the temperature at three key test points during field tests performed outdoors at about 15 °C. Figure 6 shows the temperature data recorded during high-current transmission at 72 A for 10 min. Sensors S1 and S2 measure the temperature of the MOSFET case and the Rd case, which both continuously increase over time. We note that these test points do not give the internal temperatures of either component but provide a basic understanding of the temperature changes. The S3 sensor records the heatsink temperature. The experimentally measured temperature rise essentially follows the trend obtained in the simulation with poor passive cooling of the CH. We find that the measured temperature increases by about 5 K after 600 s of pulsing at 72 A, which, given the expected uncertainty of the thermal model parameters, is in acceptable agreement with the simulated temperature rise of about 11 K after 600 s of pulsing at 93 A (Fig. 5c). The fact that only a 5 K temperature rise in the CH is observed during the extensive field test validates the CH thermal performance and is well within safe operating conditions. Table 2 shows a comparison of the simulated thermal performance of the two heatsinks. Both heatsinks perform satisfactorily for the extreme test conditions in the simulations. We note that the weight difference between SH and CH is 2.2 kg, which significantly enhances the compactness of ApsuTX without compromising the thermal performance. Also, 1920 cm3 dimension reduction is achieved because of this modification. The total power dissipated by both heatsinks is 38 W, where the H-bridge dissipates 21 W and the damping resistor dissipates 17 W. Figure 7 shows the two ApsuTX systems.
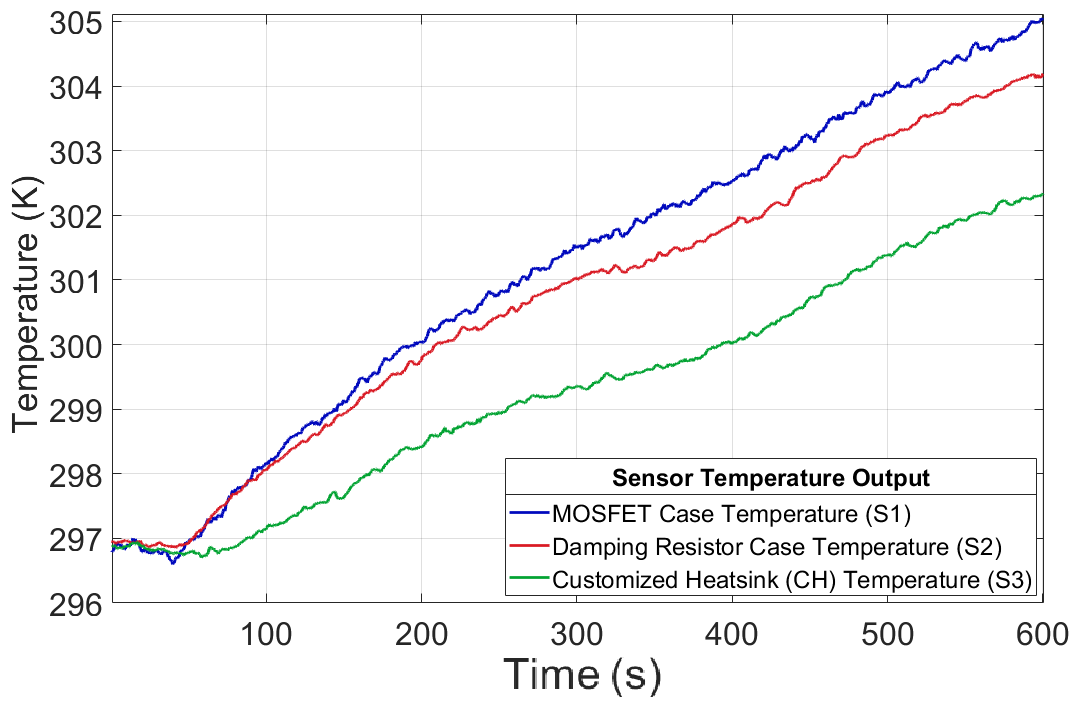
Figure 6Temperature variation in ApsuTX with CH with 72 A coil current running for 10 min during the field test.
5.2 Current-drooping results
In the drooping simulation, the time needed to stabilize the current output depends on the size of the capacitor bank. Figure 8a shows simulated inter-pulse drooping for different capacitor banks. The bank with 100 mF requires the longest time of about 75.5 s to stabilize due to its higher capacitance. Although the peak amplitude of the 100 mF bank is lower after stabilization, its energy per pulse is high because of less intra-pulse drooping. The current pulse with the 1 mF bank leads to maximum amplitude variation across each pulse because of higher intra-pulse drooping. We note that the amplitude of the pulses becomes more uniform with increasing capacitor bank size.
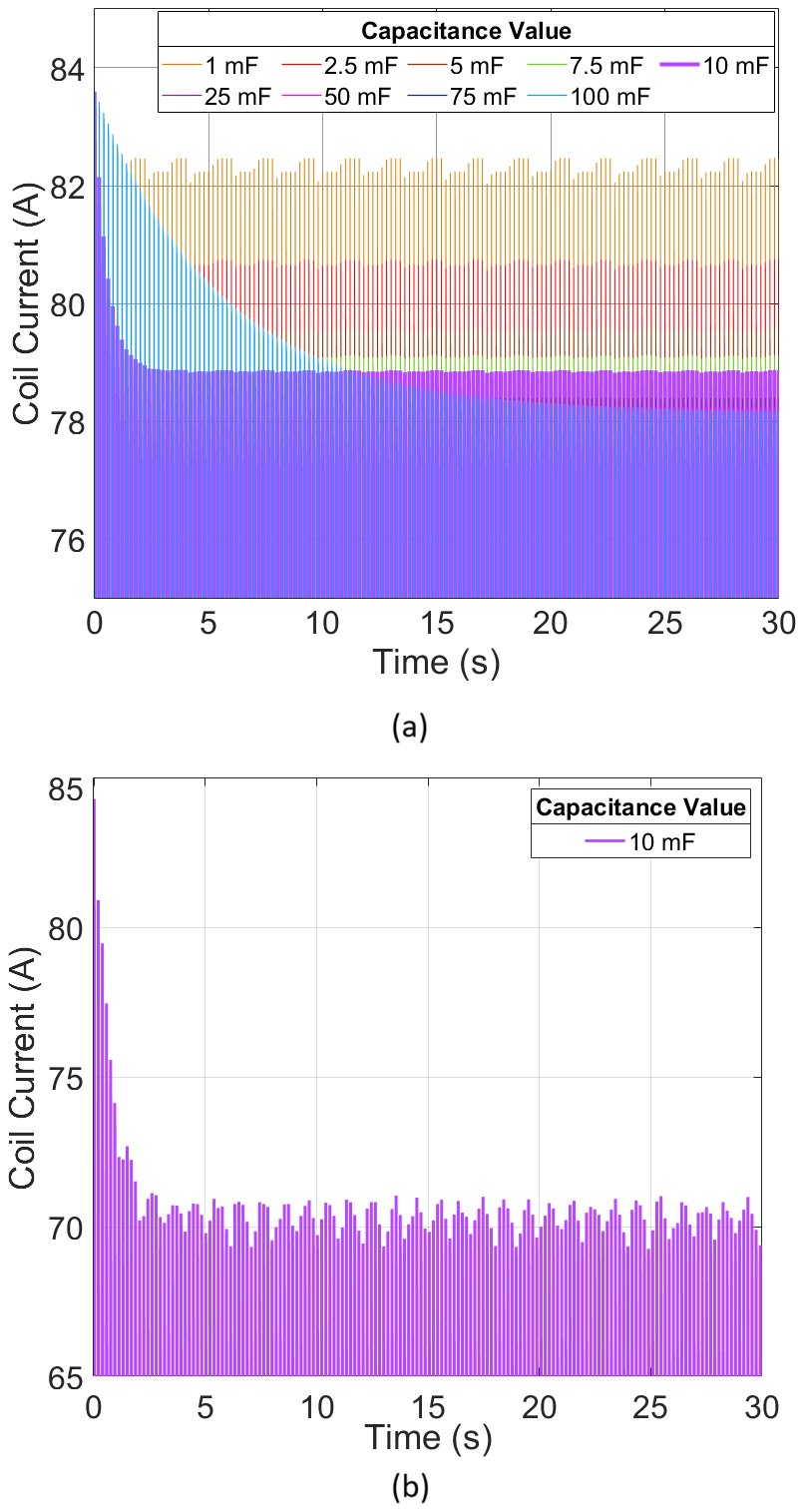
Figure 8Drooping simulation and field results: (a) inter-pulse drooping in different capacitor banks in the simulation and (b) inter-pulse drooping in the ApsuPS with 10 mF capacitor bank transmitting 70 A coil current in a field test.
In steady-state sequences, the NMR signal is acquired between the pulses and the signal directly depends upon the excitation pulse energy. We have evaluated the energy per pulse to understand the effect of intra-pulse drooping on the pulse energy. Table 3 contains capacitance value with corresponding energy per pulse and pulse drooping time, i.e. duration required to stabilize the output. Ideally, the energy per pulse should be high, resulting in an increased depth of investigation. The inter-pulse drooping must be removed for accurate groundwater exploration. Therefore, the pulse-drooping time must be as small as possible to optimize the acquisition time and the size of the capacitor bank. However, the parameters are inversely proportional, and both conditions cannot be fulfilled simultaneously. Therefore, the selection of capacitance value is made based on optimum energy per pulse and pulse-drooping time. We have chosen 10 mF as a reasonable trade-off balancing the two parameters and the form factor of the capacitor bank.
Table 3Effect of bank capacitance value on the drooping time and energy per pulse after drooping in ApsuPS.
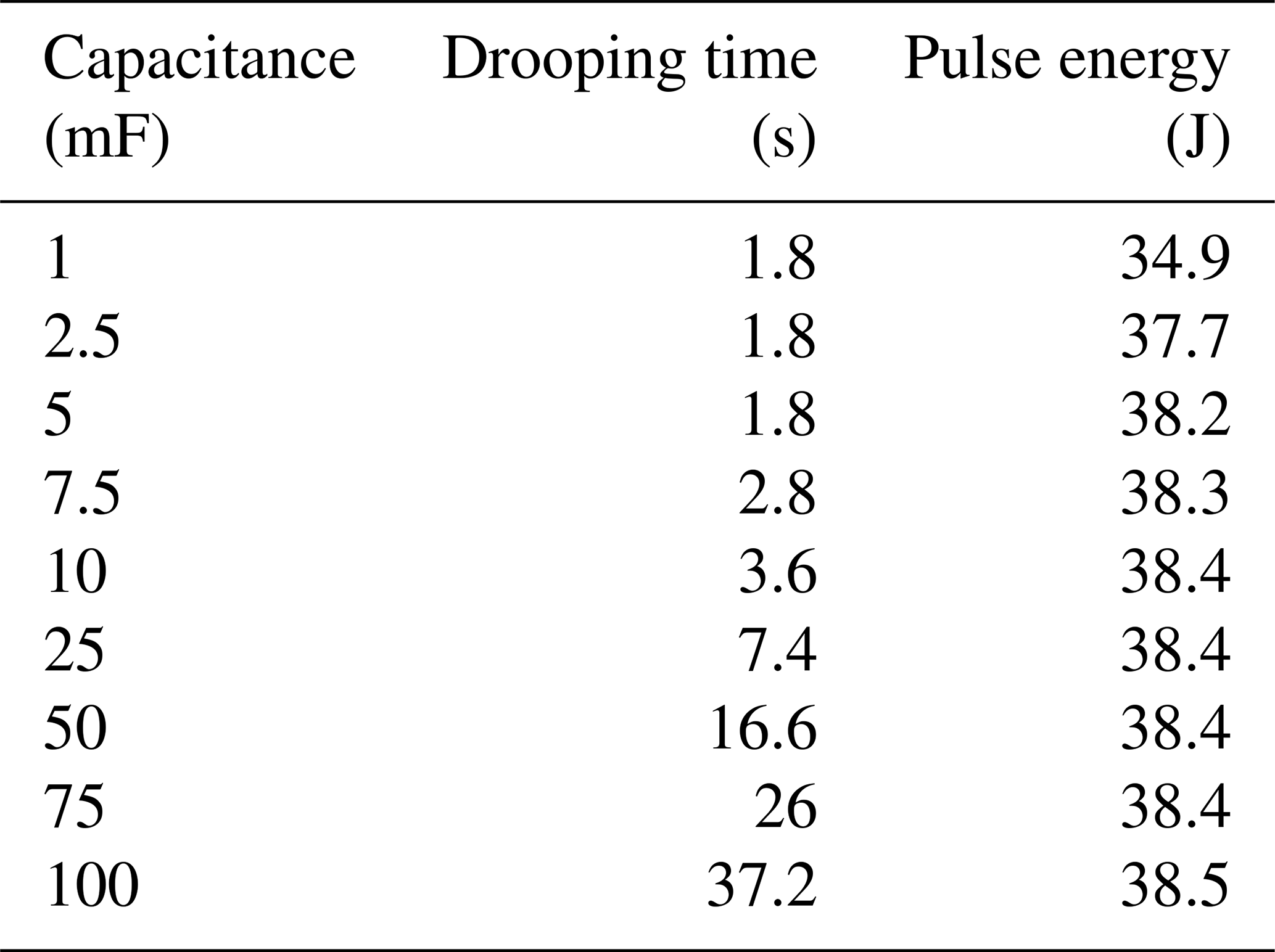
Figure 8b shows the actual drooping recorded during a survey. The observed drooping closely follows the simulation results but is not identical due to limitations in the model; e.g. the model assumes an ideal DC supply feeding the capacitor bank. The 10 mF capacitor bank needs 3.6 s to stabilize in the simulation, and it requires a similar time to stabilize in the Apsu instrument. For the example shown in Fig. 8b, the coil current is 70 A, and each pulse contains 27.99 J after drooping. Note that the oscillations in the coil currents in Fig. 8 are not real but are sampling artefacts caused by the mismatch between the current sampling frequency and the pulse timing being controlled by the 2127 Hz Larmor frequency. As discussed, achieving short drooping time and high pulse energy in the same compact and portable instrument is challenging. Still, with these component choices, we obtain a very useful trade-off. In conventional instruments, the capacitor bank can only be charged when the transmitter is off. However, ApsuPS and ApsuTX transmit NMR pulses and charge capacitor banks at the same time to maintain consistency in the pulse amplitude.
5.3 Pulse stability results
The effectiveness of the steady-state NMR method depends crucially upon the pulse stability. The transmission frequency must be consistent across all sequences, and the pulse phase and amplitude must be maintained uniformly throughout the sequences. We validate the stability of the ApsuTX transmitter by examining the generated pulse sequences. In Fig. 9, we show an eye diagram of the first oscillation in 1155 pulses from a pulse sequence with an amplitude of 75 A and a 2.127 kHz Larmor frequency. The eye diagram is fully opened and demonstrates the high stability of the pulse train.
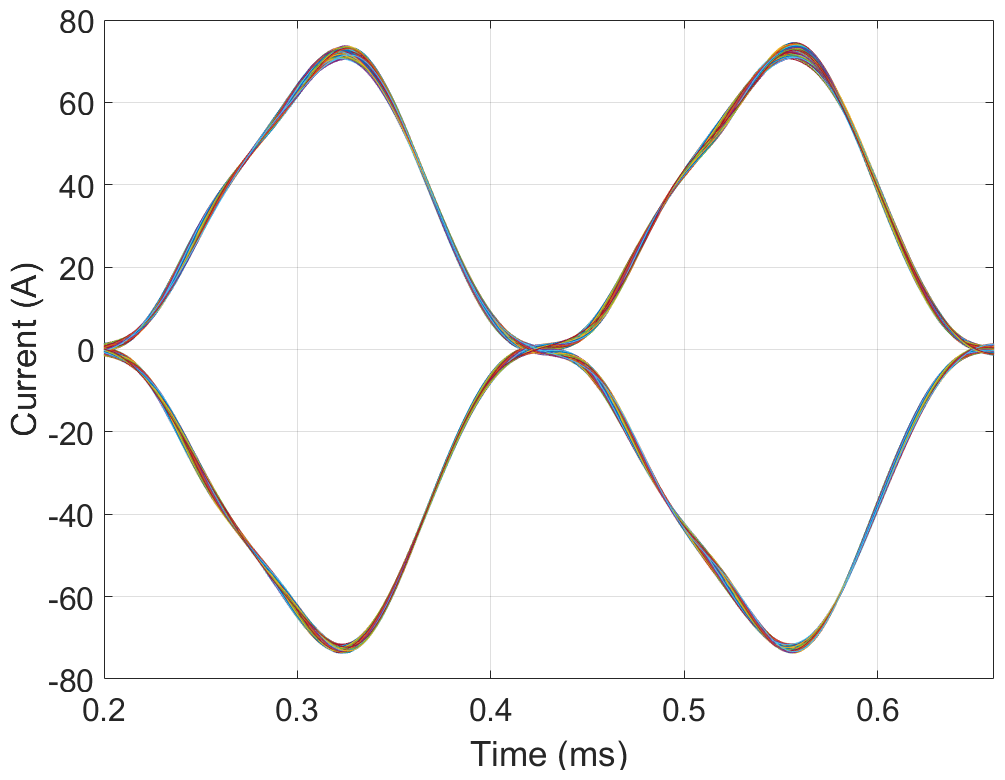
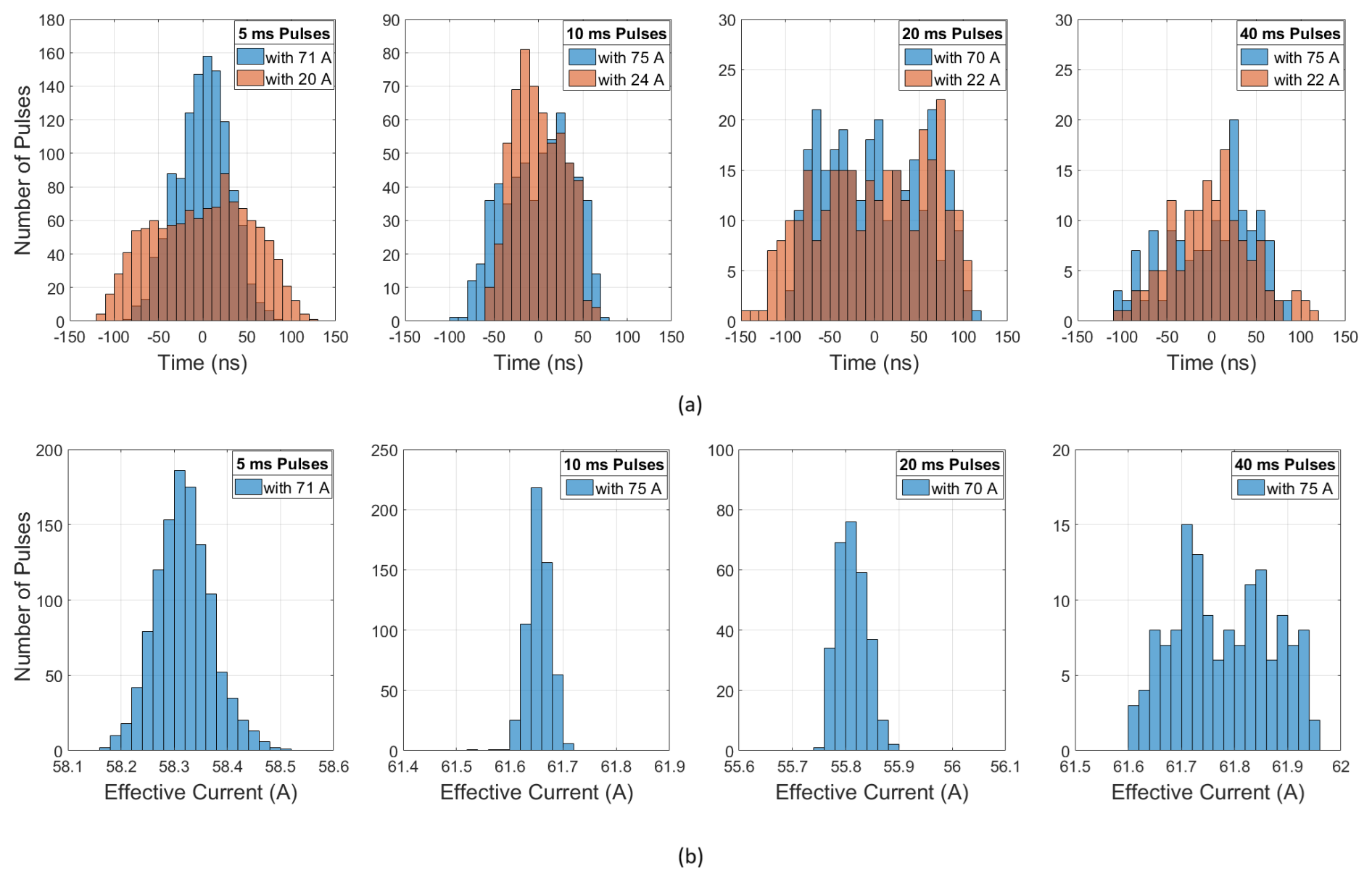
Figure 10Pulse stability. Histograms of (a) timing jitter and (b) effective current jitter between adjacent pulses in a 1 min long sequence for different pulse lengths and currents. All sequences have a 10 % duty cycle. The analysis is done on data in which the initial drooping part of the pulse sequence is removed.
A different examination of the pulse train stability is given in Fig. 10. The data for this figure are generated by fitting a sinusoidal model at the Larmor frequency to each pulse in a 1 min pulse sequence. From the models, we extract the pulse-to-pulse timing jitter and measure the pulse amplitude variations for two different currents and four different pulse lengths (Fig. 10). The plots validate that the transmitter achieves less than ±150 ns timing jitter for all sequences and currents. This jitter corresponds to less than 0.22° of phase error at the Larmor frequency. Figure 10b shows the variations in the pulse currents for the same sequences for the high current. The effective amplitude varies less than 0.5 A in all cases, which equals less than 0.4 % variation. The average standard deviations in pulse amplitude and timing are 0.05 A and 42.6 ns respectively for the high currents. For other currents (not shown), the standard deviations of pulse amplitude and timing are similar. The plots verify that the ApsuTX transmits extremely stable pulses with consistent phase and amplitude throughout the pulse trains.
The increasing temperature of the transmitter during long measurements can potentially influence the pulse stability. To investigate this, we measured the H-bridge, damping resistor, and heatsink temperatures during continuous high-current transmission of a 10 min long pulse sequence of 20 ms pulses with a 10 % duty cycle (Fig. 11). The MOSFET case and the damping resistor temperature case rise linearly by about 8 K, while the heat sink temperature rises by about 6 K during the measurement. Simultaneously, the timing jitter between pulses and the pulse current amplitude were measured. The pulse-to-pulse jitter shows random variations between −150 and 150 ns without any noticeable systematic variation correlated with temperature changes in the ApsuTX sub-systems. Similarly, the current amplitude is consistently between 55.75 and 55.90 A without any obvious correlation with temperature rise.
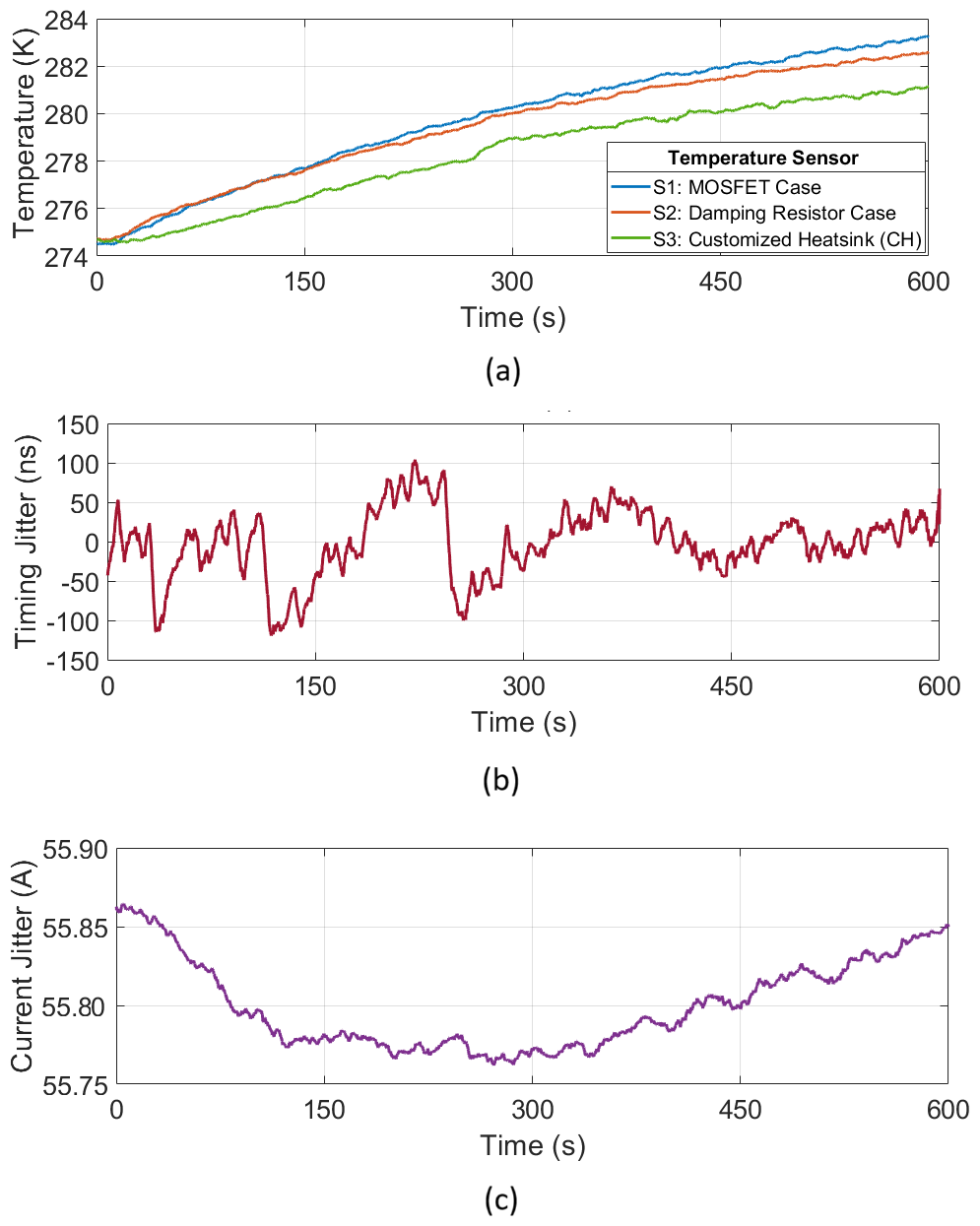
Figure 11ApsuTX temperature changes, pulse timing jitter, and coil current jitter during a 10 min sequence. (a) Change in MOSFET case temperature, damping resistor temperature, and customized heatsink temperature; (b) timing difference between consecutive pulses; (c) current amplitude for consecutive pulses. The measurement is based on 20 ms pulses and a 10 % duty cycle.
The above results clearly demonstrate the ability of the new transmitter unit to generate highly stable pulse trains. Specifically, the observed pulse-to-pulse timing jitter and amplitude variations are so small that the nuclear spin of hydrogen nuclei in groundwater can be efficiently driven into an NMR steady state. The steady-state transmitter unit has been used efficiently in numerous surveys in several countries. In this context, it is noteworthy that the 2.2 kg weight reduction obtained by the customized heatsink can seem like a small improvement, but it is highly appreciated by the field crews carrying the instrument between more than 10 sites in a given day.
We typically use 60 s long pulse sequences in steady-state surface NMR measurements. The lower limit on the length of a pulse sequence is set by current-drooping time and the time needed for the nuclear spins to reach the steady state. This later time is controlled by the NMR relaxation times and is on the order of a few seconds for common geological materials. As the pulse sequence length is increased, the data are averaged over more repetitions and the signal-to-noise ratio is increased. Experimentally, we have found that a pulse sequence length of 60 s is a good compromise, where we obtain high-SNR data in a short amount of time. In practice, many different pulse sequences with different current strength and pulse parameters are used, and a full measurement employs about 30 sequences. At sites where noise is a limiting factor, the signal-to-noise ratio can be improved using longer pulse sequences. The results presented in Fig. 6 show that, after operating for 10 min at a high current of 72 A, the MOSFET case temperature only increases by 8 K, well within safe limits. Consequently, it is possible to use very long pulse sequences if conditions necessitate this.
The depth of investigation in a surface NMR measurement is essentially controlled by the amplitude of the generated magnetic field. To obtain a deeper depth of investigation, the amplitude of the magnetic field must be increased, either by using the same current in a larger transmitter coil or by using a larger current in the same-sized coil. However, the maximum current achievable is controlled by the ratio of the transmitter voltage and the coil self-inductance. Commercial surface NMR systems, employing FID measurements, are capable of depths of investigation down to about 100 m. To do so, transmitter voltages of several kilovolts (kV) are used to generate 600–800 A currents in coils with a size of 100 m × 100 m. In contrast, the Apsu transmitter unit maximum current is ∼ 100 A in steady-state operation with a 50 m × 50 m coil and a 600 V supply, which translates to a depth of investigation of about 30 m. In principle, the extension of the steady-state concept to deeper depths of investigation through larger peak currents is simple, but the actual construction of a steady-state transmitter unit with outputs of several hundreds of amperes is a significant engineering challenge left for future research.
In this article, the design and validation of a novel high-duty-cycle transmitter unit for steady-state surface NMR measurements of groundwater was presented. The ability to generate a steady-state NMR response from groundwater hinges on the transmitter's ability to generate a high-fidelity train of coherent pulses with a negligible timing jitter and amplitude variation between pulses. In the article, we demonstrate that the transmitter unit has less than 150 ns pulse-to-pulse jitter and that the pulse amplitude is highly stable with less than 0.4 % variation. Together, this makes the transmitter fully capable for steady-state surface NMR measurements. The weight of the transmitter was optimized by designing a customized heatsink. Our results demonstrate that compact and efficient steady-state surface NMR instruments are feasible. Our instrument is now in routine use and has collected high-SNR data at numerous sites, including more than 100 soundings at temperatures above 30 °C and more than 50 soundings at temperatures above 40 °C. We foresee that future surface NMR instruments will all be based on steady-state methods, in part or as a whole, due to the demonstrated ability of this novel scheme to solve many of the issues with poor signal-to-noise ratios.
All raw data can be provided by the corresponding author upon request.
NBG: experimental design, data acquisition and analysis, simulations of electrical and thermal properties, writing. LL: instrument development, software programming. MPG: data acquisition and analysis, software programming. DG: conceptualization, instrument development. JJL: funding acquisition, conceptualization, supervision, writing.
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
The authors would like to thank Bo Bjerre and Christian Lundager Nedergaard for technical assistance.
This research has been supported by the Danmarks Frie Forskningsfond (grant no. 9041-00260B) and the Villum Fonden (grant no. 35816).
This paper was edited by Jean Dumoulin and reviewed by two anonymous referees.
Beauchamp, R. M., Arumugam, D. D., Burgin, M. S., Bush, J. D., Khazendar, A., Gim, Y., Almorqi, S., Almalki, M., Almutairi, Y. A., Alsama, A. A., and Alanezi, A. G.: Can Airborne Ground Penetrating Radars Explore Groundwater in Hyper-Arid Regions?, IEEE Access, 6, 27736–27759, https://doi.org/10.1109/ACCESS.2018.2840038, 2018. a
Behroozmand, A. A., Keating, K., and Auken, E.: A review of the principles and applications of the NMR technique for near-surface characterization, Surv. Geophys., 36, 27–85, https://doi.org/10.1007/s10712-014-9304-0, 2015. a, b, c
Binley, A., Hubbard, S. S., Huisman, J. A., Revil, A., Robinson, D. A., Singha, K., and Slater, L. D.: The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales, Water Resour. Res., 51, 3837–3866, https://doi.org/10.1002/2014WR015282, 2015. a
Carr, H. Y.: Steady-state free precession in nuclear magnetic resonance, Phys. Rev., 112, 1693–1701, https://doi.org/10.1103/PhysRev.112.1693, 1958. a
Chen, H., Yang, J., and Xu, S.: Electrothermal-Based Junction Temperature Estimation Model for Converter of Switched Reluctance Motor Drive System, IEEE T. Ind. Electron., 67, 874–883, https://doi.org/10.1109/TIE.2019.2898600, 2020. a
Costabel, S.: Noise analysis and cancellation for the underground application of magnetic resonance using a multi-component reference antenna – Case study from the rock laboratory of Mont Terri, Switzerland, J. Appl. Geophys., 169, 85–97, https://doi.org/10.1016/j.jappgeo.2019.06.019, 2019. a
Du, G., Lin, J., Zhang, J., Yi, X., and Jiang, C.: Study on Shortening the Dead Time of Surface Nuclear Magnetic Resonance Instrument Using Bipolar Phase Pulses, IEEE T. Instrum. Meas., 69, 1268–1274, https://doi.org/10.1109/TIM.2019.2911755, 2020. a
Famiglietti, J. S.: The global groundwater crisis, Nat. Clim. Change, 4, 945–948, https://doi.org/10.1038/nclimate2425, 2014. a
Girard, J.-F., Jodry, C., and Matthey, P.: On-site characterization of the spatio-temporal structure of the noise for MRS measurements using a pair of eight-shape loops, J. Appl. Geophys., 178, 104075, https://doi.org/10.1016/j.jappgeo.2020.104075, 2020. a
Griffiths, M. P., Grombacher, D., and Larsen, J. J.: Efficient numerical Bloch solutions for multipulse surface NMR, Geophys. J. Int., 227, 1905–1916, https://doi.org/10.1093/gji/ggab321, 2021. a, b
Griffiths, M. P., Grombacher, D. J., Liu, L., Vang, M., and Larsen, J. J.: Forward modelling steady-state free-precession insurface NMR, IEEE T. Geosci. Remote, 60, 4513510, https://doi.org/10.1109/TGRS.2022.3221624, 2022. a
Grombacher, D., Liu, L., Griffiths, M. P., Vang, M. Ø., and Larsen, J. J.: Steady-state surface NMR for mapping of groundwater, Geophys. Res. Lett., 48, e2021GL095381, https://doi.org/10.1029/2021GL095381, 2021. a
Grombacher, D., Griffiths, M. P., Liu, L., Vang, M. Ø., and Larsen, J. J.: Frequency Shifting Steady-State Surface NMR Signals to Avoid Problematic Narrowband-Noise Sources, Geophys. Res. Lett., 49, e2021GL097402, https://doi.org/10.1029/2021GL097402, 2022. a, b
Grunewald, E., Grombacher, D., and Walsh, D.: Adiabatic pulses enhance surface nuclear magnetic resonance measurement and survey speed for groundwater investigations, Geophysics, 81, WB85–WB96, https://doi.org/10.1190/geo2015-0527.1, 2016. a
Hiller, T., Costabel, S., Radic, T., Dlugosch, R., and Müller-Petke, M.: Feasibility study on prepolarized surface nuclear magnetic resonance for soil moisture measurements, Vadose Zone J., 20, e20138, https://doi.org/10.1002/vzj2.20138, 2021. a
Infineon Technologies AG: AN2015-10 Transient Thermal Measurements and thermal equivalent circuit models (V1.2), Infineon Technologies AG, 2020-04-14, https://www.infineon.com/dgdl/Infineon-Thermal_equivalent_circuit_models-ApplicationNotes-v01_02-EN.pdf?fileId=db3a30431a5c32f2011aa65358394dd2 (last access: 2 July 2025) 2020. a
Jiang, C., Zhou, Y., Wang, Y., Duan, Q., and Tian, B.: Harmonic Noise-Elimination Method Based on the Synchroextracting Transform for Magnetic-Resonance Sounding Data, IEEE T. Instrum. Meas., 70, 1–11, https://doi.org/10.1109/TIM.2021.3102689, 2021. a
Kremer, T., Irons, T., Müller-Petke, M., and Larsen, J. J.: Review of Acquisition and Signal Processing Methods for Electromagnetic Noise Reduction and Retrieval of Surface Nuclear Magnetic Resonance Parameters, Surv. Geophys., 43, 999–1053, https://doi.org/10.1007/s10712-022-09695-3, 2022. a
Larsen, J. J., Liu, L., Grombacher, D., Osterman, G., and Auken, E.: Apsu – A New Compact Surface Nuclear Magnetic Resonance System for Groundwater Investigation, GEOPHYSICS, 85, JM1–JM11, https://doi.org/10.1190/geo2018-0779.1, 2020. a, b, c, d
Legchenko, A. and Pierrat, G.: Glimpse into the design of MRS instrument, Near Surf. Geophys., 12, 297–308, https://doi.org/10.3997/1873-0604.2014006, 2014. a
Legchenko, A., Baltassat, J.-M., Beauce, A., and Bernard, J.: Nuclear magnetic resonance as a geophysical tool for hydrogeologist, J. Appl. Geophys., 50, 21–46, https://doi.org/10.1016/S0926-9851(02)00128-3, 2002. a
Li, T., Feng, L.-B., Duan, Q.-M., Lin, J., Yi, X.-F., Jiang, C.-D., and Li, S.-Y.: Research and Realization of Short Dead-Time Surface Nuclear Magnetic Resonance for Groundwater Exploration, IEEE T. Instrum. Meas., 64, 278–287, https://doi.org/10.1109/TIM.2014.2338693, 2015. a
Lin, T., Li, S., Gao, X., and Zhang, Y.: Improved technology using transmitting currents with short shutdown times for surface nuclear magnetic resonance, Rev. Sci. Instrum., 91, 084501, https://doi.org/10.1063/5.0007848, 2020. a
Lin, T., Zhou, K., Chen, C., and Zhang, Y.: An Improved Air-Core Coil Sensor With a Fast Switch and Differential Structure for Prepolarization Surface Nuclear Magnetic Resonance, IEEE T. Instrum. Meas., 70, 1–10, https://doi.org/10.1109/TIM.2021.3109736, 2021. a, b
Liu, J., Yang, H., Gosling, S. N., Kummu, M., Flörke, M., Pfister, S., Hanasaki, N., Wada, Y., Zhang, X., Zheng, C., Alcomo, J., and Oki, T.: Water scarcity assessments in the past, presents, and the future, Earths Future, 5, 545–559, https://doi.org/10.1002/2016EF000518, 2017. a
Liu, L., Grombacher, D., Auken, E., and Larsen, J. J.: Apsu: a wireless multichannel receiver system for surface nuclear magnetic resonance groundwater investigations, Geosci. Instrum. Method. Data Syst., 8, 1–11, https://doi.org/10.5194/gi-8-1-2019, 2019. a, b
Nexperia: RC Thermal Models, AN11261, Nexperia Application Note, https://assets.nexperia.com/documents/application-note/AN10273.pdf (last access: 2 July 2025), 2021. a, b
Postel, S. L.: Entering an era of water scarcity: the challenges ahead, Ecol. Appl., 10, 941–948, https://doi.org/10.1890/1051-0761(2000)010[0941:EAEOWS]2.0.CO;2, 2000. a
Radic, T.: Improving the Signal-to-Noise Ratio of Surface NMR Data Due to the Remote Reference Technique, in: Near Surface 2006 – 12th EAGE European Meeting of Environmental and Engineering Geophysics, 4–6 September 2006, Helsinki, Finland, https://doi.org/10.3997/2214-4609.201402690, 2006. a, b
Siemon, B., Christiansen, A. V., and Auken, E.: A review of helicopter-borne electromagnetic methods for groundwater exploration, Near Surf. Geophys., 7, 629–646, https://doi.org/10.3997/1873-0604.2009043, 2009. a
Walsh, D. O.: Multi-Channel Surface NMR Instrumentation and Software for 1D/2D Groundwater Investigations, J. Appl. Geophys., 66, 140–150, https://doi.org/10.1016/j.jappgeo.2008.03.006, 2008. a, b
Walsh, D. O., Grunewald, E. D., Turner, P., Hinnell, A., and Ferre, T. P. A.: Surface NMR Instrumentation and methods for detecting and characterizing water in the vadose zone, Near Surf. Geophys., 12, 271–284, https://doi.org/10.3997/1873-0604.2013066, 2014. a
Wang, P., Zhu, J., Wang, H., and Lin, T.: An On-Site Harmonic Noise Cancellation Antenna With a Multinode Loop for Magnetic Resonance Sounding Measurement, IEEE T. Instrum. Meas., 71, 1–10, https://doi.org/10.1109/TIM.2022.3169796, 2022. a
Wu, X., Xue, G., Fang, G., Li, X., and Ji, Y.: The Development and Applications of the Semi-Airborne Electromagnetic System in China, IEEE Access, 7, 104956–104966, https://doi.org/10.1109/ACCESS.2019.2930961, 2019. a, b
Yi, X., Zhang, J., Tian, B., and Jiang, C.: Design of Magnetic Resonance Sounding Antenna and Matching Circuit for the Risk Detection of Tunnel Water-Induced Disasters, IEEE T. Instrum. Meas., 68, 4945–4953, https://doi.org/10.1109/TIM.2019.2896372, 2019. a
Zhu, J., Yang, Y., Teng, F., and Lin, T.: Dynamic duty cycle control strategy for surface nuclear magnetic resonance sounding system, Rev. Sci. Instrum., 90, 035109, https://doi.org/10.1063/1.5078764, 2019. a